温控激光锡焊设备对激光器电源设计至关重要,由于激光器输出光功率受其激射电流的影响,为了保证其稳定的光功率输出,研制了基于位移式数字PID 算法的高稳定性激光器驱动电源。在硬件设计方面,该驱动电源主要由控制器模块、恒流源模块和保护电路模块组成。采用模拟PI 深度负反馈环节有效地提高了驱动电流的稳定性。在软件方面,采用位置式数字PID 算法,消除了实际驱动电流值与理论值之间的微小差异。利用该驱动电源,对中心波长为940.01 nm 的激光器做了驱动测试。实验表明,长期稳定性(>220 h)优于4×10-5,中心波长未出现漂移,为其在红外气体检测中提供了优越性能保障。
激光器的谱带范围覆盖大部分红外气体吸收指纹区,使得它在多个领域得到广泛应用。通常,激光器的驱动模式分为以下两种:(1) 恒流驱动模式。在该模式下工作时,激光器的驱动电流维持不变。(2) 恒光功率驱动模式。在该模式下工作时,激光器的驱动电路对激光二极管(LD)的平均光功率进行深度闭环负反馈控制。由激光器的激射电流不仅影响了其输出光功率的稳定性,造成其发光波长的波动, 而且降低其使用寿命。因此, 在近红外气体检测领域中, 研制高稳定性激光器驱动电源是十分必要的。目前,在商品化应用方面,许多国外的公司、高等院校及研究所都开展对激光器驱动电源的研究工作。尽管生产激光器的厂商有很多,但以上驱动电源长期稳定性(>220 h)优于1×10-4。考虑到上述产品的稳定性均不高的现状, 结合实际项目指标的需求, 自主设计并研制了数字PID 算法的高稳定性温控激光器驱动电源。该驱动电源在硬件上采用模拟PI 深度负反馈环节,同时结合软件位置式数字PID 算法构成双闭环反馈控制方法,有效地提高了驱动电流的稳定性。实验表明,该驱动电源长期稳定性(>220 h) 优于4×10-5, 具有良好的实用价值。
高稳定激光器驱动电源系统主要由控制器模块、恒流源模块和保护电路模块组成。结构框图如图所示。采用32 位定点型处理器作为嵌入式控制器; 芯片内部的数模转换器(DAC)产生高速高精度的模拟信号。恒流源模块的驱动原理是根据MOSFET 的栅极控制电压VGS与MOSFET 的导通电流ID 之间的关系来调节驱动激光器的电流。保护电路模块分别对驱动电流进行过载保护, 电源电压波动进行瞬态抑制、消除电路的静电干扰。因此, 保护电路能够使激光器工作于更复杂的电磁环境中, 大大延长其使用寿命。
恒流源模块是在恒定输入电平下, 输出恒定电流,恒定电流大小完全由输入脉冲电压幅值调节。
恒流源模块采用模拟PI 深度线性负反馈原理,通过取样电阻R5对流过激光器的驱动电流进行采样,将电流信号转变成电压信号。实际中,根据激光器驱动电流参数需要, 对系统的响应速度和信号稳定精确度进行折中处理, 最终选择需要的参数来达到激光器驱动的性能指标。
在延时软启动电路方面, 对经典π 型网络进行了改进,借助NPN 型达林顿晶体管的大电流来间接提高电容的等效容值,使它产生大电容的效果,如果达林顿管的电流放大倍数为k,则在基极与地电位之间接入的电容C2就等效于在源极与地之间接入了容值为(1+k)C2的大电容。此外,该电路还可以实现DFB 激光器驱动的慢启动与慢关闭,具体的工作方式为:电源接通瞬间,Q1截止,它的初始射极输出电流为零, 外部电流通过接在达林顿管基极与集电极之间的电阻给电容C2充电,它的基极电位开始缓缓上升, 当超过截止电压后,Q1的工作状态由截止变为放大, 它的发射极电流由初始状态一直变大直至饱和,同时三极管Q2基极电位也开始增大,最终Q2导通,滤波电路的输出电压等于它的输入电压。当电源断开时,变化过程同理。这样,激光器的开启与关闭都能躲过上电与断电瞬间的电网浪涌冲击,具体的延迟时间与电阻R 的取值有关。
在实际使用过程中,存在大量静电,如果处理不当,静电就会损伤激光器。文中系统在激光器两端并联瞬态抑制器(TVS),构成静电通路,避免静电损坏激光器。
数字形式的PID 算法是将连续模拟的PID 算法在时间上等间隔T 采样,进行数字离散化。相邻两点采样之和作为积分项,之差作为差分项,数字形式的PID 表达式如下:
式中:T 为采样间隔;TI为积分项参数;TD为微分项参数;e(i)为系统第i 次采样的偏差值。实际中, 对于复杂的系统建立的数学模型跟真实系统存在很大的差异, 所以工程中通常采用临界比例带法, 即不需要建立目标系统数学模型的前提下, 利用经验公式, 实现对P、I 和D 三个参数进行整定。整定经验公式如下表所示。
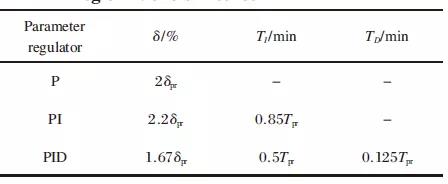
临界比例带法具体实现过程如下:
(1) 初始化系统,使积分项和差分项为零,只存在比例环节。
(2) 调节比例系数P, 待系统输出响应等幅震荡。此时,比例系数P 记为即临界比例带δpr,震荡周期记为Tpr,如图所示。
(3) 利用表1 中所示的经验公式,计算各个参数。在激光器的驱动实验中,系统采用位移式数字PID 算法, 消除了实际驱动电流值与理论值之间的微小差异,其软件流程图如图 所示。
在激光器驱动电源上电之后,核心控制器首先完成系统各组成模块的初始化工作, 设置驱动电流, 并完成对DAC 输出电压的控制,驱动恒流源模块。同时,系统实时显示并监测驱动电流,一旦没有达到预设电流值,系统将采用位移式数字PID 算法,对误差电流信号进行计算,输出控制信号, 改变DAC 输出电压, 进而调节驱动电流的大小,最终使驱动激光器的电流稳定在预设值。利用该激光器驱动电源, 对中心波长为940.01 nm 的激光器做了驱动测试。
在进行系统性能测试过程中, 为了消除电磁干扰,采用铝制屏蔽盒将外部环境与系统隔离。激光器上电后,首先对其驱动电流的线性度进行测量。将激光器的工作温度控制在25 ℃, 采用所研制的驱动电源,通过设置不同的控制电压,观测反馈通道的电压变换情况,最终换算成电流变化。其测试结果如图6 所示。
结果显示,系统输出电流差值峰值为0.086 3 mA,线性度达到99.87%。
实验中, 进一步对所研制的驱动电源输出电流的稳定度进行了实验,结果如图7 所示。
实验中, 预设驱动电流为100 mA, 长期测试(>220 h)结果平均值为100.mA,与均值相差最大电流为0.000 44 mA, 输出电流的稳定度好于4×10-5A。
实验中采用中心波长为940.01nm 的激光器为驱动对象,根据器件的技术手册,激光器激光发生的中心谱线的波长为940.01 nm。在驱动性能实验中,采用THERMO4700 型傅里叶红外光谱仪测量的激光器中心谱线如图 所示。
图为使用中红外傅里叶光谱仪测得的激光器的发射谱线, 其发光光谱为波数为940.01 nm,实验中通过调节器工作温度与驱动电流来实验对其发射波长的控制,可以与气体吸收峰匹配得更好。
在近红外气体检测领域中,针对激光器驱动电源高稳定性需求,文中介绍了采用模拟PI 深度负反馈环节和位置式数字PID 算法相结合,构成双闭环反馈控制方法, 设计并研制了一种高稳定性激光器驱动电源。此外,该驱动电源具备防上电/断电冲击保护电路、延时软启动电路和过流保护电路等保护电路,保证了激光器长期稳定的工作。同时,利用该驱动电源, 对激光器做了驱动测试。结果显示,其驱动电流线性度为99.97%,稳定度为4×10-5A,满足实际指标的需求。
 鄂公网安备 42018502000562号
鄂公网安备 42018502000562号

